Leistungen
Industrielle Bildverarbeitung, Schwerpunkt 3D
Beratung
Eine unserer wichtigsten Leistungen ist die Beratung. Wir führen neue Sensortechnologien in die bestehenden Lösungen unserer Kunden ein und optimieren dabei gemeinsam ganze Anlagenkonzepte.
DownloadMachbarkeitsstudien
Im Rahmen von Machbarkeitsstudien evaluieren wir die Einsatz- und Umsetzungsmöglichkeiten neuer Technologien und Konzepte.
Download
Prozessentwicklung
Bei der Prozessentwicklung bedienen wir uns der Analyse und Optimierung eines Prozesses zum Zwecke der (Teil-)Automatisierung.
DownloadProduktentwicklung
Bei der Produktentwicklung übernehmen wir die Konzeption, Machbarkeitsstudien, Beschaffung und/oder Entwicklung von Hard- und Software, Inbetriebnahme, Vertestung, Optimierung, Dokumentation und Pflege eines neuen Produktes.
DownloadVermessung
Wir bieten Vermessungsdienstleistungen sowie eine entsprechende Datenaufbereitung an.
Dies ist insbesondere für die technischen Gebäudeausstatter sowie für industrielle Anlagen und Großmaschinen interessant.
DownloadQualitätssicherung
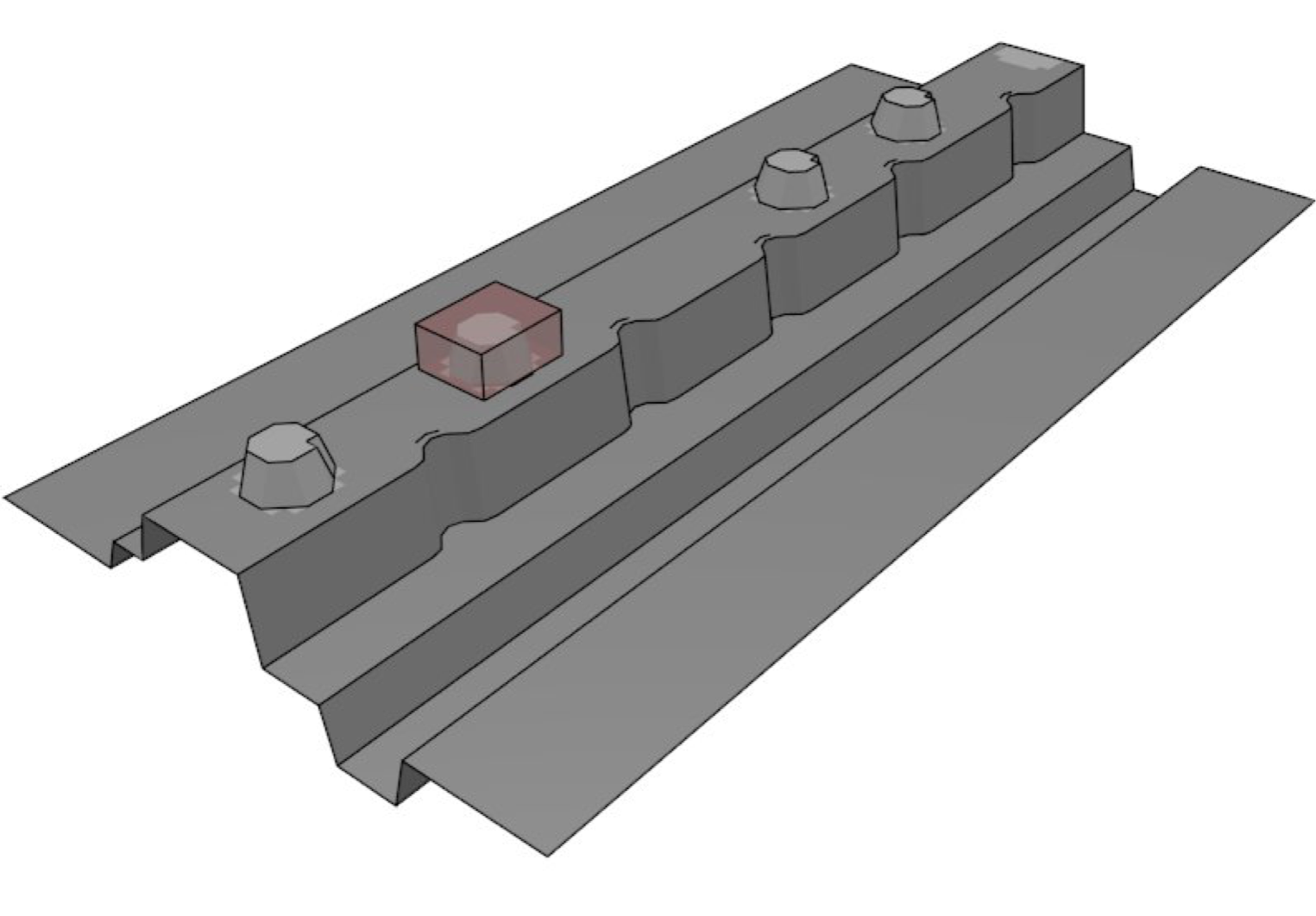
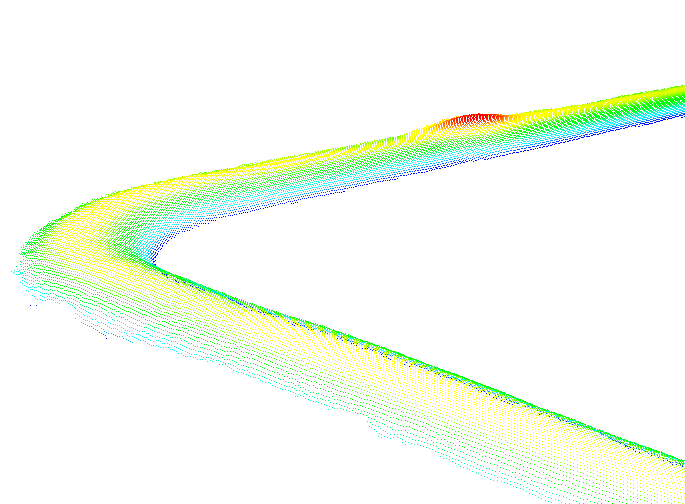
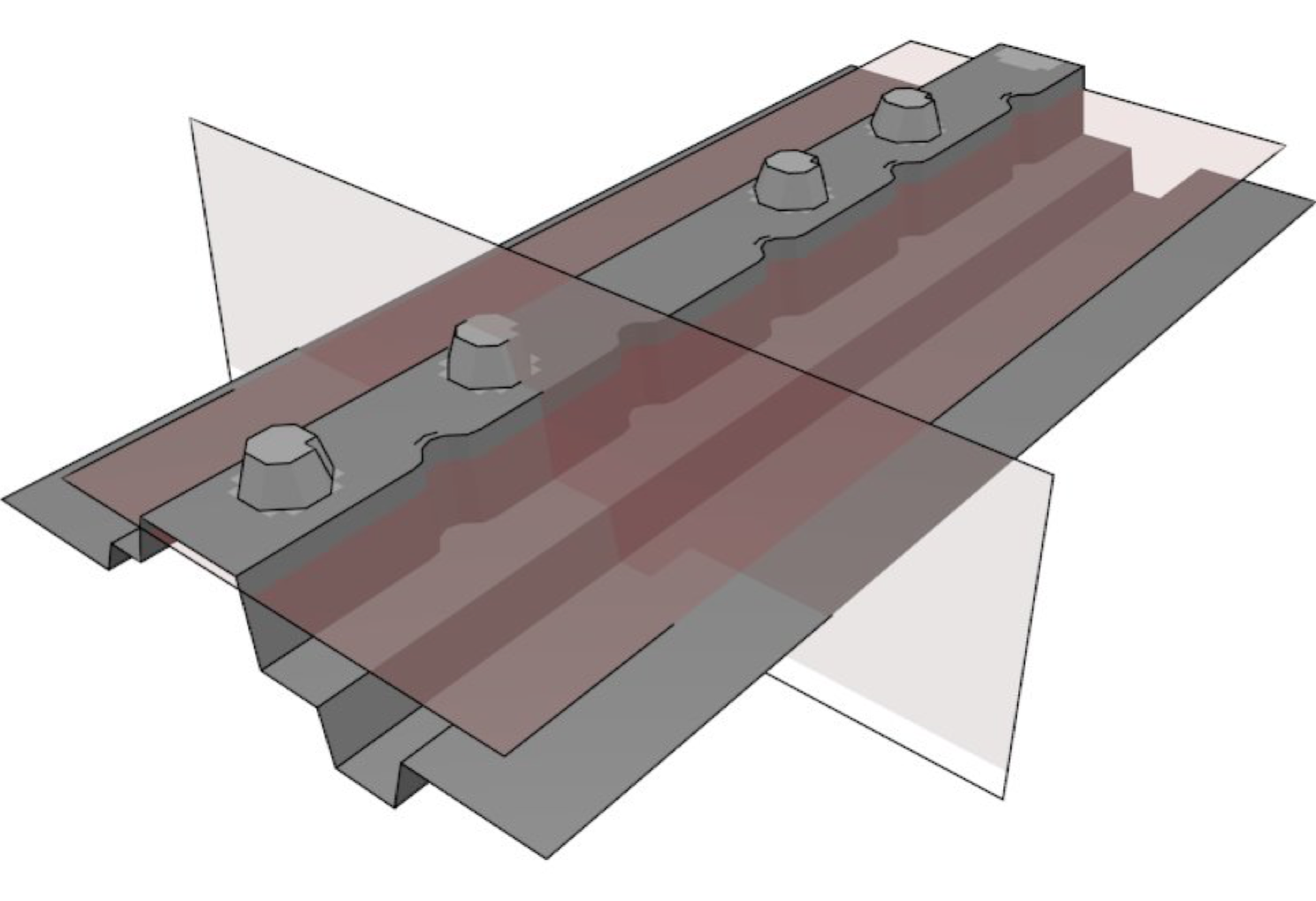
Qualitätssicherung
Durch eine Auswertung im dreidimensionalen Raum ist es möglich Aussagen über die Form und Oberflächenbeschaffenheit eines bestimmten Bauteils treffen zu können. Es ist möglich dazu bestimmte Bereiche in den Daten zu segmentieren und diese Einzelprüfungen zu unterziehen.
End-of-Line Testing / EOL
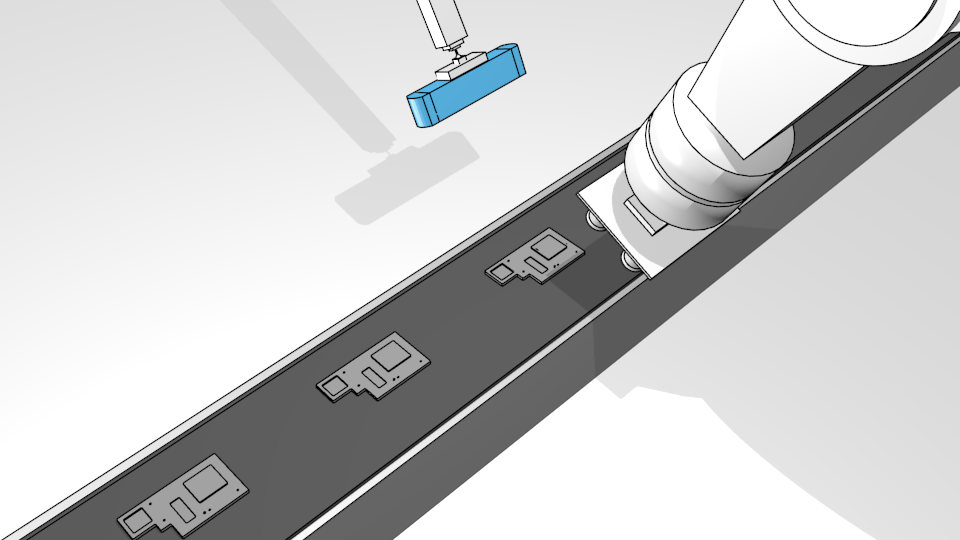
End-of-Line Testing / EOL
Komplexe Baugruppen werden am Ende der Montagelinie auch heute noch häufig per Hand nach Checkliste kontrolliert. Unsere robotergestützte Qualitätssicherung erlaubt die Planung und Automatisierung solcher Prüfroutinen.
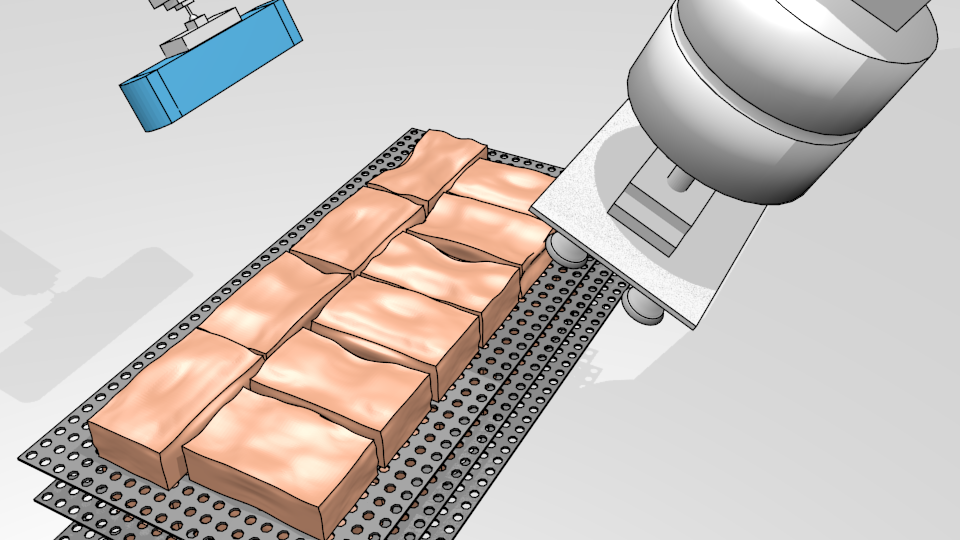
Pick & Place / Palettieren
Pick & Place / Palettieren
Werkstücke, die einlagig vorsepariert auf der Fördertechnik liegen, werden mittels unseres Bildverarbeitungssystems lokalisiert. Die Greif-Koordinaten werden an einen Roboter übergeben, der die Teile dann aufnimmt und anschließend korrekt positioniert einem nächsten Prozess zuführt.
Je nach Vorgang, beim Palettieren oder Depalettieren, werden die Produkte aus den Werkstückträgern entnommen und auf der Montagestrecke abgelegt, oder von der Produktionslinie aufgenommen und in den Werkstückträger platziert.
Bin Picking / Griff in die Kiste
Bin Picking / Griff in die Kiste
Zumeist kleinere Werkstücke, welche chaotisch in einem Behältnis liegen, werden mittels unseres Bildverarbeitungsystems lokalisiert und die Greif-Koordinaten an einen Roboter übergeben. Dieser nimmt ein Teil aus dem Behältnis auf und führt es anschließend vorpositioniert dem nächsten Prozess zu.